

Autonomous Aircraft for Field Response
Flights to decisions

Mission inputs
Combine route plans, RGB and thermal frames, GPS traces, aircraft health, terrain context, and operator notes into one mission picture.
Field handoff
Turn detections into coordinates, confidence, imagery, and response notes that field teams can act on immediately.
Shared view
Keep command, aircraft, and field responders aligned around the same operating area, coverage state, and escalation path.
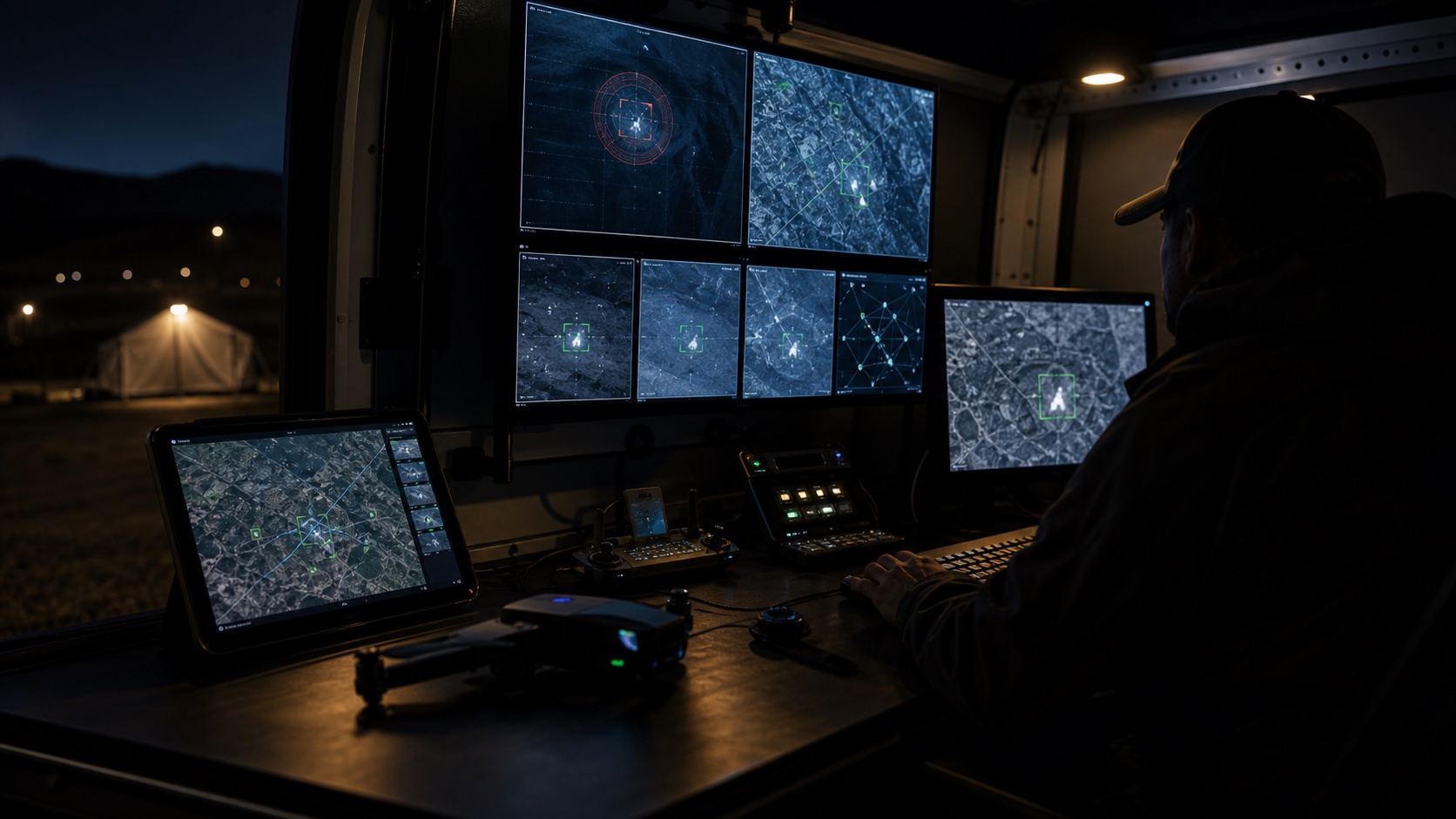
Live aircraft state
Track aircraft status, route progress, battery margin, comms health, and return behavior from one command surface.
One map for every mission
Terrain-aware routing
Understand boundaries, distance, occlusion, route overlap, launch zones, hazards, and likely access paths across complex terrain.
Safety constraints
Reason about battery windows, no-fly areas, terrain limits, comms degradation, line of sight, and safe return envelopes before tasking aircraft.
Coverage gaps
Convert partial observations into useful state: searched areas, unresolved corridors, ranked detections, and handoff-ready locations.

Built by Engineers From






Expanded search coverage

Next search areas
Project where teams, assets, or subjects may move next based on terrain, prior sightings, route constraints, and time since last contact.
Route simulations
Compare what-if plans for coverage, battery swaps, aircraft routes, launch points, and response windows before committing teams.
Recommended actions
Surface the next best search corridor, escalation state, aircraft task, or field handoff as structured guidance for operators.



Start reliable. Scale with confidence
The first Horus package is deliberately focused: a reliable aircraft loop, a serious command surface, detection review, geolocation, and return-home behavior that operators can trust.
- Single-aircraft autonomous search loop
- Thermal/RGB detection and geolocation
- One-operator multi-aircraft supervision
- Coverage analytics for after-action review